【摘要】随着深度学习技术的引入,自动驾驶汽车目标检测算法取得了重要进展。从目标检测技术发展的角度,对传统目标检测算法与当前应用于自动驾驶车辆的深度学习目标检测算法进行了梳理,分析了具有里程碑意义的检测器、网络结构以及最新的检测方法,并针对目标检测技术的发展方向进行了探讨。
【摘要】针对当前自动驾驶感知算法训练与测试过程中出现的多源异构数据稀缺、场景适配性不足等问题,构建了基于典型场景的多模态感知数据集,包含10个特定典型场景片段,涵盖激光雷达、摄像头和4D毫米波雷达等多模态传感器数据,提供了6种类别目标物的标注信息,并详细描述了数据采集设备的配置信息,包括传感器参数、标定数据和时间同步处理方案。所构建的数据集可为自动驾驶感知算法提供特定的驾驶场景信息,提升算法在复杂场景下的感知精度,从而提高自动驾驶系统的安全性与可靠性。
【摘要】为在复杂的城市街道背景条件下实现更为高效的交通标志小目标识别,提出了一种改进的YOLOv5s算法,通过引入卷积块注意模块(CBAM)空间通道注意力机制、自适应空间特征融合(ASFF)模块和改进检测框的损失函数进一步提升网络性能,TT100K交通标志数据集上的验证结果表明,所提出的改进算法的交通标志识别平均精度均值(mAP)达到 84.5% 。
【摘要】针对车辆行驶过程中复杂多变的车内环境和光照条件及驾驶员行为姿态多样性对驾驶员异常行为检测与识别的影响,提出一种基于对比学习的驾驶员异常驾驶行为检测算法。首先,将驾驶员驾驶行为检测视为二分类任务,使用对比学习的方法,将驾驶员正常驾驶与异常驾驶样本进行对比,并通过对比损失函数提高模型的性能。其次,以驾驶员正前方和上方的深度图像作为输入,通过提供驾驶员的深度信息解决车内环境复杂、光照强度变化及视角盲区问题。最后,在轻量化网络MobileNetV2基础上引入3D卷积,并在每个瓶颈结构的卷积层中加入通道混洗操作,提高识别的准确性。试验结果表明,提出的算法在驾驶员异常检测(DAD)数据集测试集中的准确率达到 94.18% ,受试者操作特征(ROC)曲线下面积(AUC)达到0.962,该算法在驾驶员异常行为检测方面具有有效性。
【摘要】为分析车内交通灯(IVTL)对驾驶行为特性的影响,设计了驾驶员数据采集系统,以交通信号灯视线遮挡为试验环境,公开招募50名20\~40岁的受试者进行驾驶模拟器试验,采集车辆状态数据和驾驶员状态数据并进行预处理后,利用统计学方法对相关性指标进行分析,结果表明:相较于无车内交通灯,配备车内交通灯时平均车速显著提高;在交通信号灯被大型车辆遮挡条件下,跟随车与前车的距离有所减小,可潜在提高道路通行效率;车内交通灯可辅助驾驶员更加专注地驾驶车辆。
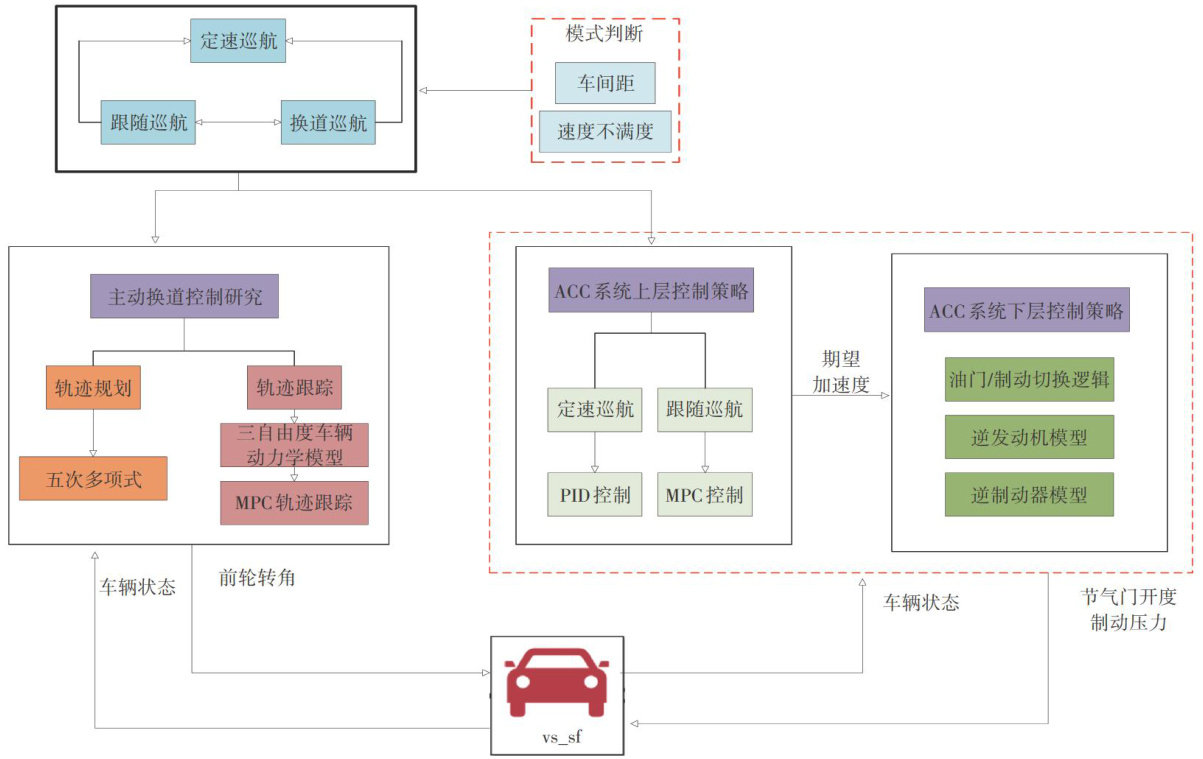
【摘要]针对传统自适应巡航控制(ACC)系统在遇到前方低速车辆时仅能保持低速跟驰的局限性,开发了一种具有换道功能的ACC系统。首先将驾驶模式细分为定速巡航、跟随巡航和换道巡航,并基于速度不满度制定了多模式切换策略以灵活应对不同的驾驶场景和驾驶员需求,然后,在现有ACC系统的基础上加入主动换道功能,应用五次多项式精确规划换道轨迹,基于模型预测控制(MPC)算法构建了换道巡航轨迹跟踪控制器。最后,基于MATLAB/Simulink/CarSim对所搭建的控制器进行验证,结果表明,该策略可以实现符合驾驶员意图的主动换道功能。























 登录
登录