

目录
快速导航-

自动驾驶汽车测试技术专刊 | 自动驾驶仿真软件性能一致性验证与优化
自动驾驶汽车测试技术专刊 | 自动驾驶仿真软件性能一致性验证与优化
-
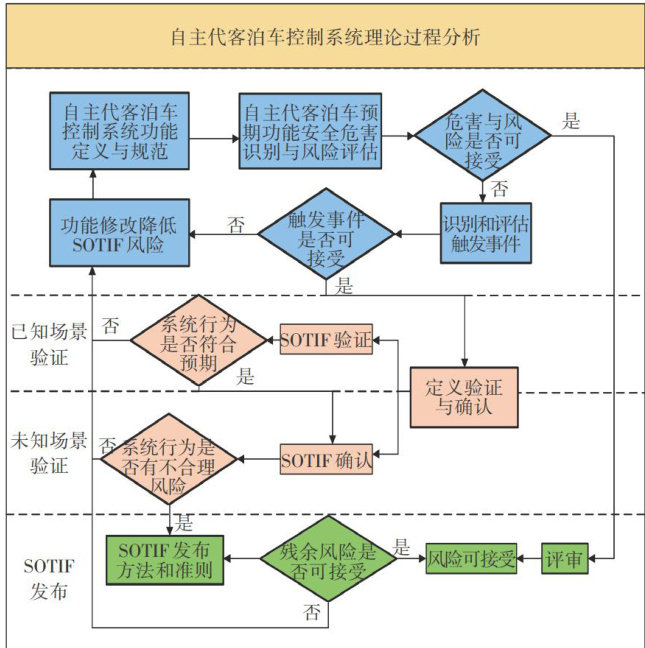
自动驾驶汽车测试技术专刊 | 面向场景的自主代客泊车预期功能安全研究
自动驾驶汽车测试技术专刊 | 面向场景的自主代客泊车预期功能安全研究
-

自动驾驶汽车测试技术专刊 | 面向超薄承载机器人的横向运动控制算法研究
自动驾驶汽车测试技术专刊 | 面向超薄承载机器人的横向运动控制算法研究
-

自动驾驶汽车测试技术专刊 | 基于场地测试的商用车移动信息系统性能测试及评价方法
自动驾驶汽车测试技术专刊 | 基于场地测试的商用车移动信息系统性能测试及评价方法
-

自动驾驶汽车测试技术专刊 | 封闭测试场条件下多模式车联网通信性能测试与验证
自动驾驶汽车测试技术专刊 | 封闭测试场条件下多模式车联网通信性能测试与验证
-

自动驾驶汽车测试技术专刊 | 面向干线物流自动驾驶运输系统的测试方案设计
自动驾驶汽车测试技术专刊 | 面向干线物流自动驾驶运输系统的测试方案设计

















 登录
登录