

目录
快速导航-

前沿综述 | 视觉和激光SLAM发展综述与展望
前沿综述 | 视觉和激光SLAM发展综述与展望
-

测试方法 | 碳纤维对纳米偏高岭土再生混凝土力学性能及微观结构试验研究
测试方法 | 碳纤维对纳米偏高岭土再生混凝土力学性能及微观结构试验研究
-

测试方法 | 基于一维卷积神经网络的家庭用户特征识别方法
测试方法 | 基于一维卷积神经网络的家庭用户特征识别方法
-

测试方法 | 基于改进SwinTransformer的人脸活体检测
测试方法 | 基于改进SwinTransformer的人脸活体检测
-

测试方法 | 基于磁场梯度和能量法的钢丝绳断丝检测方法
测试方法 | 基于磁场梯度和能量法的钢丝绳断丝检测方法
-

测试方法 | 改进YOLOv7复杂场景下的车牌检测方法
测试方法 | 改进YOLOv7复杂场景下的车牌检测方法
-

测试方法 | 考虑随机漂移-扩散的非线性维纳过程可靠性分析
测试方法 | 考虑随机漂移-扩散的非线性维纳过程可靠性分析
-

测试方法 | 基于协整分析的供热管道泄漏定位方法
测试方法 | 基于协整分析的供热管道泄漏定位方法
-

测试方法 | 面向微小气体流量的临界流喷嘴校准方法实验研究
测试方法 | 面向微小气体流量的临界流喷嘴校准方法实验研究
-

测试方法 | 光谱共焦传感器光轴与被测平板间垂直度误差校准方法
测试方法 | 光谱共焦传感器光轴与被测平板间垂直度误差校准方法
-
测试方法 | 基于机器视觉检测的焊接双臂协作机器人变质心补偿控制方法
测试方法 | 基于机器视觉检测的焊接双臂协作机器人变质心补偿控制方法
-

测试方法 | 沙漠重载铁路槽型梁水化热温度监测与分析
测试方法 | 沙漠重载铁路槽型梁水化热温度监测与分析
-

测试方法 | 金果榄UPLC指纹图谱及多指标含量测定研究
测试方法 | 金果榄UPLC指纹图谱及多指标含量测定研究
-

测试方法 | 拐枣提取物的活性成分及肠道菌群调节作用研究
测试方法 | 拐枣提取物的活性成分及肠道菌群调节作用研究
-

仪器设备 | 轮轨接触力无线遥测系统的研究与开发
仪器设备 | 轮轨接触力无线遥测系统的研究与开发
-

仪器设备 | 基于软件定义无线电的可编程微波辐射计设计
仪器设备 | 基于软件定义无线电的可编程微波辐射计设计
-

仪器设备 | 基于差分进化算法的转子有限元模型修正
仪器设备 | 基于差分进化算法的转子有限元模型修正
-

技术应用 | 车身高度调节中的滑模控制神经网络消抖技术
技术应用 | 车身高度调节中的滑模控制神经网络消抖技术
-

技术应用 | 基于STGCN-Transformer的短期电力净负荷预测
技术应用 | 基于STGCN-Transformer的短期电力净负荷预测
-

技术应用 | 不均衡下分类器评价辅助GAN的轴承故障诊断方法
技术应用 | 不均衡下分类器评价辅助GAN的轴承故障诊断方法
-
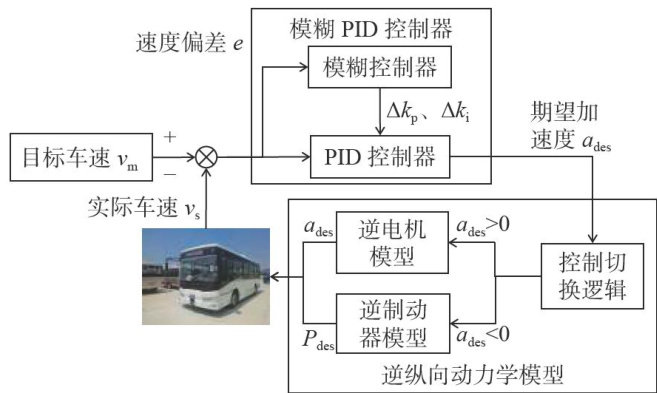
技术应用 | 基于实车调参的自动驾驶模糊PID纵向控制算法
技术应用 | 基于实车调参的自动驾驶模糊PID纵向控制算法
 之间,最高温度出现的时差在 4h 以内,拟合结果较为理想。5)由水化热应力场仿真结果可知,梁体存在温度应力大于同龄期混凝土抗拉强度的区域。综上,该槽型梁存在因温度应力而产生开裂的风险,应在施工过程中设置合理的温控方案,避免上述情况的发生。
之间,最高温度出现的时差在 4h 以内,拟合结果较为理想。5)由水化热应力场仿真结果可知,梁体存在温度应力大于同龄期混凝土抗拉强度的区域。综上,该槽型梁存在因温度应力而产生开裂的风险,应在施工过程中设置合理的温控方案,避免上述情况的发生。















 登录
登录